


AI and Robots - Azeotrope or Entities*
AI and Robots - Azeotrope or Entities*
Service robots as part of a viable system


The use of robots, and in particular service robots that can perform more complex courses of action autonomously, is being accelerated significantly by advances in artificial intelligence and machine learning (Graetz & Michaels, 2018). Matthew Gladden's (2014) study examined the relationship between two characteristics that affect a robot's ability to effectively perform management functions in 35 robotic systems: those of autonomy and sociality. He anticipates that further studies in this area of management robotics will not only help organizations identify existing robots that can effectively perform specific management functions but will also help engineers develop new robots and artificial intelligence systems that are optimally suited to fill specific management roles.

Where robots used to mainly substitute for human activities, they can be used in a complementary context with the help of powerful AI for longer and longer. They are thus capable of handling more complex tasks or supporting relationships with humans (Wykowska, 2021). Likewise, essential leadership behaviors can now also be fulfilled by robots. Current leadership research, which focuses on human-human relationships, needs to change because advances can also be expected in the leadership capabilities of robots. New approaches to leadership theory are needed for the use of robots (Jung & Hinds, 2018). Tsai et al. (2022) systematically examined the human‐robot collaboration literature in the areas of management, economics, psychology, and engineering, using a levels‐of‐analysis framework, integrated with different roles of robots (i.e., follower, partner, and leader). Their results show “that, in general, (1) the fields of management and economics have addressed human‐robot collaboration issues to a comparatively lesser extent than the fields of engineering and psychology; (2) research has shifted from a focus on task leadership behavior to a more nuanced investigation of relationship leadership behavior in human‐robot collaboration; (3) limited research has investigated robots as leaders, especially in the management and economics fields; and (4) with regard to levels, most research attention has been paid to leadership entities in human‐robot collaboration at the individual level. It is thus theoretically important for future research to explore leadership entities in human‐robot collaboration at higher levels of analysis (i.e., dyad, group/team, and organization/collective)” (Tsai et al., 2022, 10). Against this background, the following research questions arise, which will be answered in this post.
Is Stefford Beer’s (1984) Viable System Model suitable for the planning and controlling of human-robot cooperation?
What general-abstract recommendations can be derived from the application of the model for theory and practice?
Management Model 👩🏼🍳
In this blog, we focus on linking the system thinking between an organization as a social system and robots as “co-workers” in that system at different levels. In the disciplines of computer science and cybernetics, the terms system and system design are often used to explain how things work. For this reason, we use the Viable System Model by Stafford Beer (Beer, 1984) and analyze the role of the service robot in this model. We furthermore examine the challenges of implementing a service robot in an existing functioning organization system using the Viable System Model (VSM).

The VSM has been used in various disciplines either for diagnosing challenges in existing systems or for designing new and more effective systems (Hildbrand & Bodhanya, 2015). The VSM is based on the structure of the human nervous system which is one of the most viable and resilient systems of all. The VSM is based on five management subsystems that constitute the operations and meta-systems of any viable system (Vahidi et al., 2019a; Vahidi et al., 2019b; Vahidi & Aliahmadi, 2019). The principles of the VSM are recursion, autonomy, cohesion, and viability (Brecher et al., 2013; Vahidi et al., 2019a). According to Vahidi et. al. (2019a, b) recursive in this context means that each individual subsystem is a viable system in its own terms and every subsystem can be seen as an autonomous entity (Brecher et al., 2013).Viability means capability of independent existence (Vahidi et al., 2019a) and to remain independent (Brocklesby & Mingers, 2005). A viable system therefore must have five key systems in place to operate effectively (Gill & Espejo, 1997): implementation (system 1), coordination (system 2), control (system 3), intelligence (system 4) and policy (system 5). Among these single systems linkages, interaction and information exchanges must exist to be viable (e.g. standards, instructions, resources provision) (Hildbrand & Bodhanya, 2015). Each of these subsystems fulfills its purpose. The system 1 are the operational units which are responsible for the primary activities in an organization. The system 2 is planning and coordinating the activities of system 1 (tactical planning). The system 3 optimizes the collective operations via thorough internal screening and controlling. The system 4 observes the environment, collects information, and develops suitable strategies for the future. The system 5 represents the vision and identity of the organization (Vahidi et al., 2019b).
Beer's VSM has been discussed intensively in academic circles, but the practical application of this model in the comparison of robots and organization as a system is completely missing. Therefore, in this article the VSM is used to analyze an organization with its subsystem and the service robot as system in the system. In addition, we show at which system level the robots perform their task.
Findings 🤖
In the following, the concrete implementation of the VSM is explained on the basis of the five systems. The systems are described top-down, considering the time frame: normative = long-term, strategic = medium-term, operational = short-term.
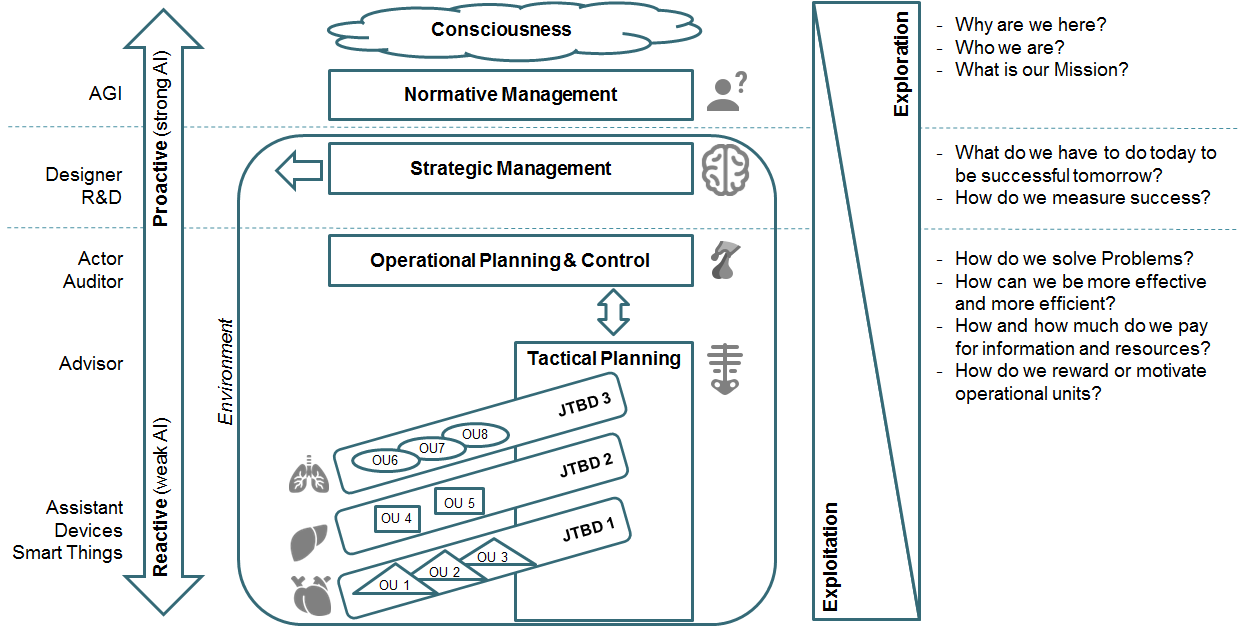
System 5 (policy) is responsible for the normative orientation of the system. It corresponds to the self-awareness of an organism and is supposed to answer questions such as "Why do we do what we do?", "What is our mission?" or "What is the socio-political legitimation of our existence?". The Board of Directors is responsible for answering these questions.
System 4 (intelligence) is responsible for looking into the future and coordinates the medium-term interaction between the inner and outer worlds. It thus formulates the strategic guidelines for the underlying system 3.
System 3 (control) plans, coordinates and monitors the operational implementation of the overarching strategic goals.
System 2 coordinates the various activities of system 1, managing and controlling processes.
System 1 (implementation) are the operational units responsible for the primary activities in an organization.
In the following table, we summarize our findings along the five systems of the VSM and provide an outlook for further development. The first column shows the referenced system in VSM, the second describes the tasks and responsibilities of the people in the respective systems, the third column shows what tasks the robot can perform at the present time and the last column describes what tasks a robot could perform in the future.

Discussion and Conclusion 🎓
A major challenge in the planning and control of service robots in the everyday life is the different affinities of the employees with technology. Service professionals have chosen this profession because they like to be in direct contact with people and they usually also have a social vein. If machines now take over parts of these tasks, this contradicts the basic attitude of the employees. Against this background, it must be scrupulously ensured that the use of such machines mainly takes over activities that allow the employees to provide more and high-quality services to people.
In addition, the question arises as to when the system is viable with the robot, or when is robot viable in the system? If robots are used as operating units on system level 1, the VSM seems suitable for planning and controlling human-robot cooperation. Here, organizational adjustments must be made, and a step-by-step implementation plan must be followed. In the beginning, only a part of the institution (e.g. a station, a department) should be involved and only simple, understandable tasks should be taken over by the robot as autonomously as possible. Later, more complex tasks can be planned via the robots agenda or on-demand by the staff. It must be ensured that at least the managers of system 2 & 3 are involved in the project from the beginning. To ensure that robots are also used in the institution in the long term, this intention should be strategically anchored.
The literature analysis revealed a small amount of management studies of human-robot collaboration systems. Such challenges as reconfigurability, flexibility, time and cost reduction can be included in a comprehensive study. For instance, the trade-off between workforce and cobots is a hot research topic, in which the number of workforce and cobots must be balanced so that the total cost is minimized (Hashemi-Petroodi et al., 2020).
Lastly, on the part of the robot manufacturers, it must be ensured that the devices are networked so that functioning applications can be exchanged with each other. This means that the manufacturers not only have to constantly develop the hardware and software of their robots, but also establish an ecosystem or platform so that users can exchange their codes via this platform or even trade (precondition for system 4 & 5). Above all, there is the ethical or philosophical question of how we can ensure that our planet remains a humanly dignified place to live despite robotics and AI.
Your take-away 👊
From a technical point of view, there is nothing to prevent electromechanical or biomechanical technology controlled by artificial intelligence from replacing human thought and action sooner or later. The real key question is therefore more of a philosophical nature:
How must the consciousness of the AI be programmed so that very long-term goals and ethical considerations can be discussed reasonably.

Best,
Prof. Dr. Andreas Ziltener LinkedIn | Insta | Twitter

Pic: StudioAlpha
Roll-Right-In is a reader-supported publication. To receive new posts and support my work, consider becoming a free or paid subscriber.
*ChatGPT: The title "AI and Robots - Azetrope or Entities" serves as a conceptual exploration of the deep integration and individual identity of AI and robotics within human contexts. The term "azeotrope" metaphorically represents how AI and robots are melded seamlessly into various aspects of society and industry, maintaining their influence across different environments similar to a chemical mixture that cannot be separated by simple distillation. The word "entities" contrasts this by suggesting that AI and robots may also act as independent agents with distinct roles and characteristics, potentially possessing autonomous functionalities that set them apart from being mere tools. This duality invites readers to consider the complexity of AI and robotics as both integral and individualistic components of modern technological landscapes.”